科学技術振興機構.
参考文献の役割と書き方
.
科学技術情報プラットフォーム.
https:/
 🏠
🏠
🏠
🏠
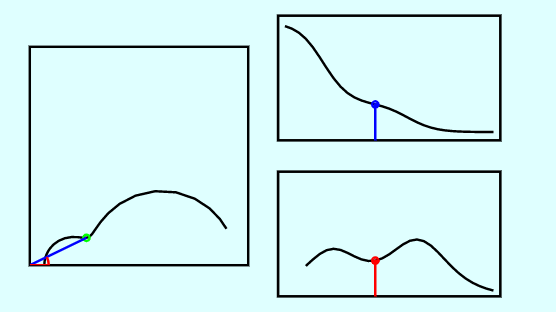
インピーダンスは、周波数の関数です。周波数とともにコールコールプロット(ナイキストプロット)上と ボードプロット上でどのような軌跡を描くか、スライダーをドラッグして周波数を変えてみましょう。

python では、複素数が使えるので、短いプログラムでコールコールプロットのシミュレーションができます。
# ■■■ コールコールプロット
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as patches
import cmath
import math
from google.colab import files
R= 2000
C = 0.1e-6
Rs = 500
t = np.arange(start = 0, stop = 5, step = 0.05)
f = [pow(10,p) for p in t]
z = [1/(1/R+1j*2*np.pi*p*C) + Rs for p in f]
x = [ p.conjugate().real for p in z]
y = [ p.conjugate().imag for p in z]
r = [ abs(p.conjugate()) for p in z]
ph = [ cmath.phase(p.conjugate())/math.pi*180 for p in z]
#ph = [ math.atan2(p.imag, p.real) for p in z]
ax = plt.subplot2grid((2, 2), (0, 0), rowspan=2)
ax.set_aspect('equal')
ax.set_xlabel("$Z^{\prime}$ / $\Omega$")
ax.set_ylabel("$-Z^{\prime \prime}$ / $\Omega$")
plt.scatter(x, y,alpha=0)
x_min, x_max = ax.get_xlim()
y_min, y_max = ax.get_ylim()
ax.set_xlim(0, x_max)
ax.set_ylim(0, y_max)
for t in np.arange(start = 500, stop = 2000, step = 500):
ax.add_patch(patches.Circle(xy=(0, 0), radius=t, fc='none', ec='#B0FFFF'))
for t in np.arange(start = 1, stop = 12, step = 1):
ax.axline((0, 0), slope=math.tan(math.pi*t/24), color='#B0FFFF')
plt.plot(x, y)
ax = plt.subplot2grid((2, 2), (0, 1))
ax.set_xlabel("$f$ / Hz")
ax.set_ylabel("$|Z|$ / $\Omega$")
plt.xscale('log')
plt.plot(f, r)
ax=plt.subplot2grid((2, 2), (1, 1))
ax.set_xlabel("$f$ / Hz")
ax.set_ylabel("$\u03b8$ / deg") # \theta では表示できない
plt.xscale('log')
plt.plot(f, ph)
plt.savefig('fig_cole_cole_python.SVG');files.download("fig_cole_cole_python.SVG")
plt.savefig('fig_cole_cole_python.PNG');files.download("fig_cole_cole_python.PNG")
# ■■■ コールコールプロット
| 名称 | ||
|---|---|---|
| サイクリックボルタモグラム | ||
| 🖱 クロノポテンショグラム | ||
| 🖱 コールコールプロット |
インピーダンスは数式1で示されます。
複素平面にプロットしたインピーダンスの周波数による軌跡を コールコールプロットまたは ナイキストプロットと呼びます。
| 直流 | 交流 | |||
|---|---|---|---|---|
| 主な対象 | 界面 | バルク | ||
| 主な評価項目 | 直流抵抗( DCR) | イオン導電率 | ||
| 主な評価方法 | 短絡試験、定負荷試験、定電流試験 | 交流インピーダンス法 、 過渡応答試験 |
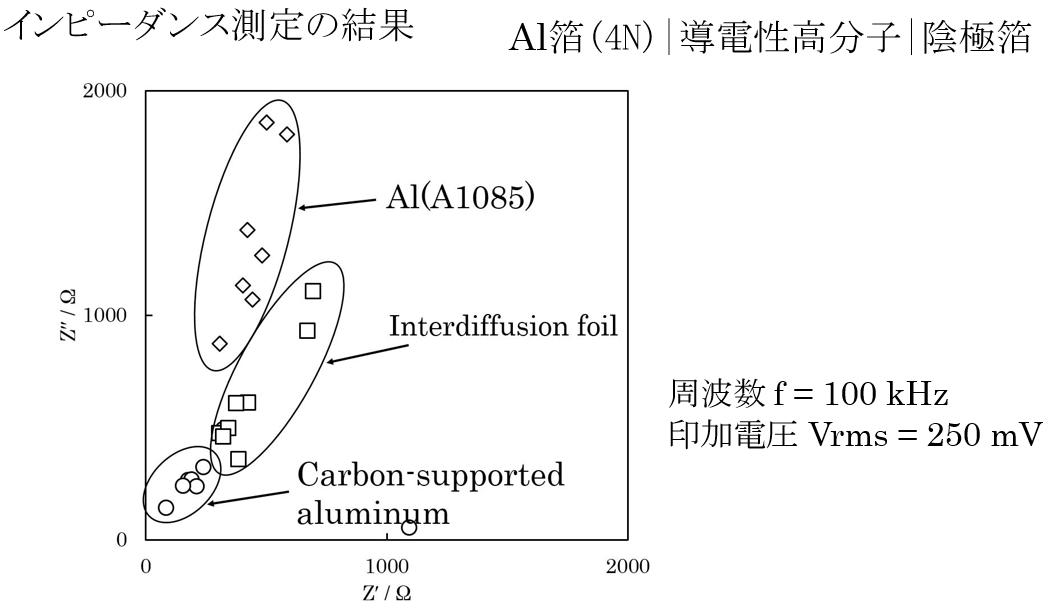
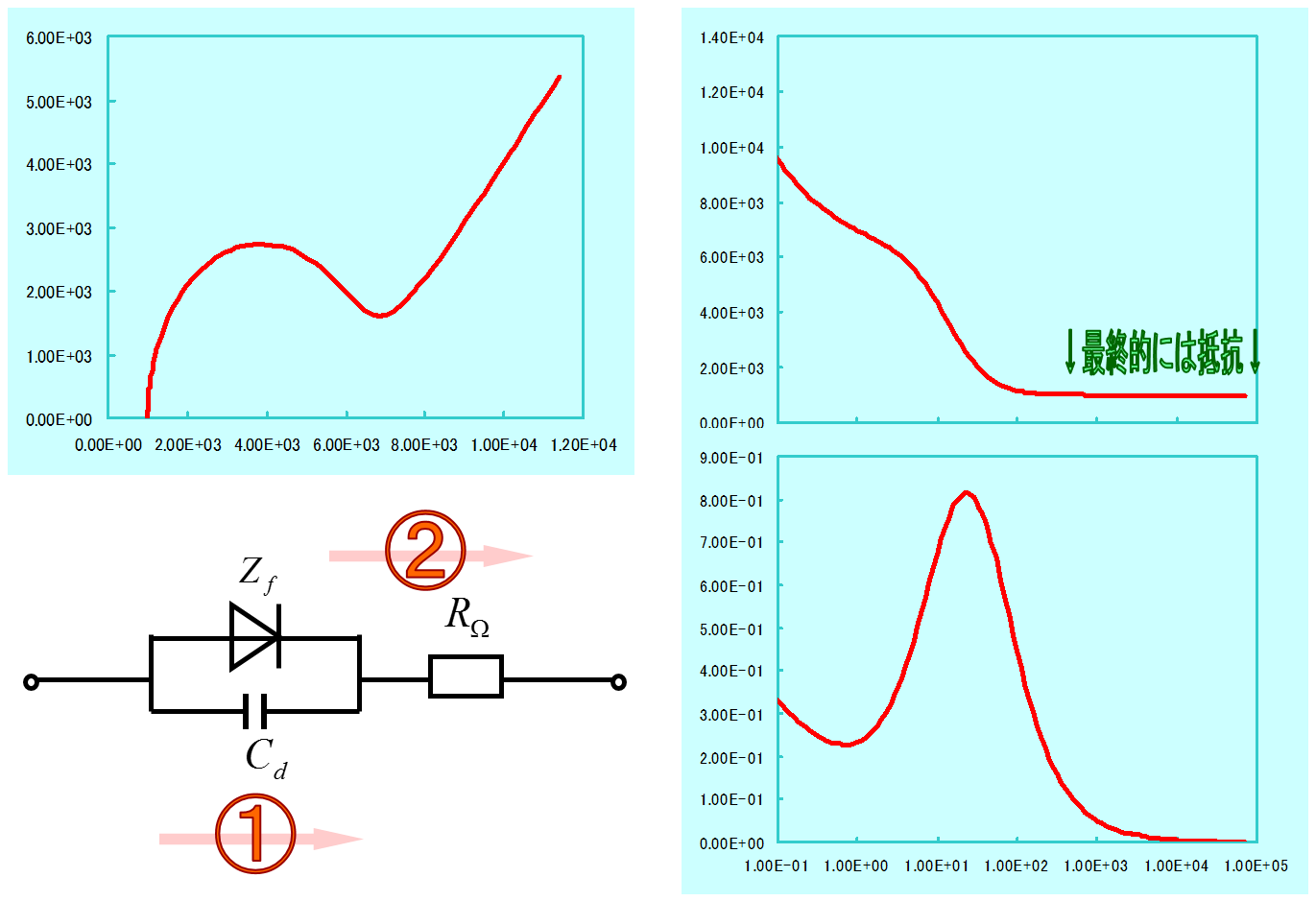
交流インピーダンス法 で測定した、 コールコールプロット の切片は、バルク抵抗(溶液抵抗など)です。 複雑な 電池の内部抵抗 は、 バルク抵抗より界面抵抗に支配されます。 周波数が高いと、界面抵抗と 並列の容量が比較的小さくても(皮膜、 空間電荷層) リアクタンスが小さくなってしまうため、 内部抵抗の推定は、直流抵抗の評価が大切です。
科学技術振興機構.
参考文献の役割と書き方
.
科学技術情報プラットフォーム.
https:/
ろっとん.
RLC直列回路
.
わかりやすい高校物理の部屋.
http:/
佐藤共史.
交流回路の合成インピーダンス
.
電気と資格のお勉強.
http:/
関口理希.
ぼくはメンディ
.
山形大学理工学研究科 修士論文,2018.
https:/
インピーダンスは複素数なので、実部と虚部があります。 実部をリアクタンスと言い、虚部をレジスタンスと言います。 各周波数でのインピーダンスを複素平面上にプロットしたものを コールコールプロットあるいはナイキストプロットと言います。
そもそもなぜインピーダンスを測定したいのか。 等価回路 にフィッティングしたければ、 インピーダンス解析ソフトウェアZView などを使えばいいです。
| 物理量 | 数式 | 備考 | |
|---|---|---|---|
| 周期 T〔s〕 | 🖱山のてっぺんからてっぺんまでの時間です。 | ||
| 周波数 f〔Hz〕 | f = 1/T | 周波数と振幅で交流を表現します。 | |
|
角周波数
|
ω=2πf | ||
| 電圧 振幅Ep0 | 交流の大きさの表現には、振幅のほかにピークトゥピークや実効値があります (※)。 | ||
| 電流 振幅Ip0 | |||
| インピーダンス Z〔Ω〕 | * | ||
| 絶対値 |Z| | |||
|
位相角
|
|||
| アドミタンス Y〔S〕 | * | ||
| インダクタンス L | |||
| 静電容量C | |||
| 電気抵抗 R | インピーダンス Z の実部 | ||
| リアクタンス X | インピーダンス Z の虚部、 X=ωL-1/ωC | ||
| コンダクタンスG | アドミタンス Y の実部 | ||
| サセプタンス B | アドミタンス Y の虚部 |
